
-
 Cryocold凯瑞克制冷科技-专注-56℃~-186℃超低温自复叠制冷技术,国内超低温制冷深冷行业领跑者,我们产品及服务已涵盖军用、民用、科研试验等行业领域。
Cryocold凯瑞克制冷科技-专注-56℃~-186℃超低温自复叠制冷技术,国内超低温制冷深冷行业领跑者,我们产品及服务已涵盖军用、民用、科研试验等行业领域。  Cryocold凯瑞克制冷科技-超低温自复叠制冷技术,高效环保超低温制冷机组替代液氮制冷,采用多元混合工质环保制冷剂,国际领先的单压缩机自然复叠制冷技术!
Cryocold凯瑞克制冷科技-超低温自复叠制冷技术,高效环保超低温制冷机组替代液氮制冷,采用多元混合工质环保制冷剂,国际领先的单压缩机自然复叠制冷技术! -
重点客户








-
-
 只需轻点鼠标,即可了解售前售后的服务政策,查询超低温制冷深冷常见问题,并在线提交产品需求信息。
只需轻点鼠标,即可了解售前售后的服务政策,查询超低温制冷深冷常见问题,并在线提交产品需求信息。  在线技术支持、产品样册下载、超低温制冷技术文档共享,无论您遇到任何问题,我们都将随时为您提供服务。
在线技术支持、产品样册下载、超低温制冷技术文档共享,无论您遇到任何问题,我们都将随时为您提供服务。 -
 根据行业流行趋势,市场动态和行业分析整理制作出最热门相关空调专题。
根据行业流行趋势,市场动态和行业分析整理制作出最热门相关空调专题。  凯瑞克人工作中积极主动,生活中也不凡情调。我们坚信:只有开阔视野和愉悦心情,才能在工作中游刃有余。
凯瑞克人工作中积极主动,生活中也不凡情调。我们坚信:只有开阔视野和愉悦心情,才能在工作中游刃有余。














行业新闻
在地球上如何模拟太空失重环境?航空航天科技
发表时间:2016-07-09 编辑:admin
目前,空间微重力环境地面模拟主要通过以下手段实现:落塔法、抛物飞行法、水浮法、悬吊法、气悬浮法以及在医学、生理学中应用的头低脚高位卧床法(人体)和尾部/后肢悬吊法(动物)。
1、落塔法
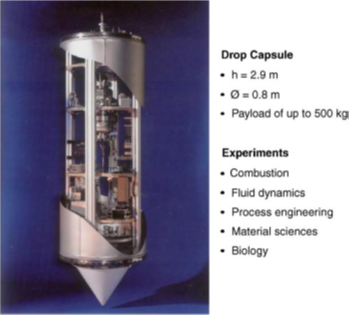
落塔法就是在微重力塔中执行自由落体运动,物体在作自由落体运动时可以获得很好的微重力状态。实验系统一般由内外两部分组成,内部主要是内层实验舱和外层隔离舱,外部主要为塔体或管壁和对下落舱的操作装置、释放机构、减速回收装置、提升装置和抽真空装置等。
美国的NASA研究中心建立了第一个落塔,能够实现 ~
~ 量级的微重力环境。日本、欧洲和中国等在美国之后相继研制成果了更先进、实验时间更长的落管、落塔。图1所示为NASA进行落塔试验俯视图。
量级的微重力环境。日本、欧洲和中国等在美国之后相继研制成果了更先进、实验时间更长的落管、落塔。图1所示为NASA进行落塔试验俯视图。
图1 NASA落塔试验俯视图


1、落塔法
落塔法就是在微重力塔中执行自由落体运动,物体在作自由落体运动时可以获得很好的微重力状态。实验系统一般由内外两部分组成,内部主要是内层实验舱和外层隔离舱,外部主要为塔体或管壁和对下落舱的操作装置、释放机构、减速回收装置、提升装置和抽真空装置等。
美国的NASA研究中心建立了第一个落塔,能够实现
图1 NASA落塔试验俯视图
图2为日本的JAMIC微重力落塔,该塔是建在一个高710m的煤矿竖井中,其自由落体高度为490m,是世界上第一个拥有10s实验时间的微重力塔,目前已经完成了空间机器人的捕获目标实验。
图2 日本JAMIC落塔
图3、图4所示为德国的布莱梅落塔及其吊舱结构,位于德国应用空间技术与微重力中心。落塔建成于1990年,高146m,可以模拟10s的空间站微重力现象。
图3 德国布莱梅微重力落塔
 图4 德国布莱梅微重力落塔吊舱
图4 德国布莱梅微重力落塔吊舱
落塔法对空间微重力环境的模拟精度较高、安全可靠、可重复利用,且可以进行三维空间的微重力实验。缺点是:造价高,由于实验舱尺寸的限制,通用性差,而且单次微重力模拟时间过短,使得对于飞行器的各种设备性能指标无法较好的考核,在空间机器人地面微重力模拟实验应用方面受到很大限制。
2、抛物飞行法
抛物飞行法可以创造微重力和低重力环境,失重飞机能够创造相对长时延的失重环境,失重时间可达20~30s作用,可以创造低重力(如月球和火星重力)的空间模拟试验环境,是近地面进行微重力研究较为理想的试验平台,美国、俄罗斯、法国等都建造有不同类型的失重飞机。飞机失重抛物线飞行分为如下4个阶段:首先飞机平飞,然后加速上行,接着跃升拉起至高点后进入抛物线轨迹进行失重状态飞行,接着俯冲拉起进入平飞后结束。
图5 飞机抛物线运动产生微重力示意图
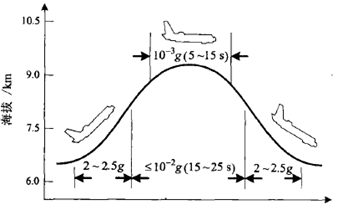 图6 KC-135A失重飞机中进行飞行器对接试验
图6 KC-135A失重飞机中进行飞行器对接试验
 图7航天员在KC-135A失重飞机中进行训练
图7航天员在KC-135A失重飞机中进行训练
 抛物飞行法对微重力环境的模拟精度较高,失重飞机可重复利用,也可以进行三维空间的微重力实验。缺点是:造价昂贵,不仅受到空间机器人外形尺寸的影响,同时也受到飞行器重量的影响,且飞行的安全性也要考虑。由于单次实验的微重力实验时间短,因此对飞行器的各种设备的性能指标无法较好校核。
抛物飞行法对微重力环境的模拟精度较高,失重飞机可重复利用,也可以进行三维空间的微重力实验。缺点是:造价昂贵,不仅受到空间机器人外形尺寸的影响,同时也受到飞行器重量的影响,且飞行的安全性也要考虑。由于单次实验的微重力实验时间短,因此对飞行器的各种设备的性能指标无法较好校核。
3、水浮法
水浮法就是利用水的浮力来抵消空间飞行器重力,通过调整装置来调整漂浮器的浮力,使得试验目标所受向上的水浮力与向下的重力平衡,进而产生随机平衡漂浮状态的一种微重力模拟方法。
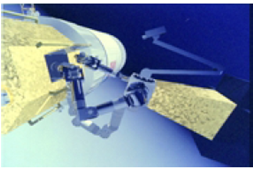
目前,中性浮力水槽训练已成功应用于:1)航天员训练。美国和俄罗斯/苏联航天在载人航天飞行前均在中性浮力模拟失重训练设备中,经受过多次训练,以体会失重情况下的漂浮感,掌握在失重情况下穿航天服的人体运动的协调性、姿态控制方法,以及掌握出舱活动、空间操作、运送货物和修理航天器的技能。2)实施任务支援。对于载人航天飞行期间发生的意外故障,可在中性浮力水槽内研究解决的对策与故障排除程序。3)对接和组装大型空间结构。利用中性浮力模拟试验设备可进行大型空间结构的对接和组装试验,从而保证了空间结构和组装程序的安全可靠,并培训航天员在轨操作的技能。4)评价硬件设计。利用中性浮力水槽可评价载人航天器采用的各种机构和可伸展的轻质柔性构件等在失重状态下的设计是否合理、性能是否可靠,以及验证它们的运动特性等。
图8 NASA进行水浮试验
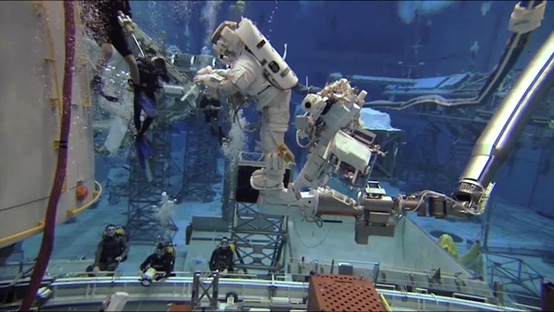 图9 Ranger机器人水浮系统
图9 Ranger机器人水浮系统
目前各个航天大国都有自己的水浮试验系统,其中具有代表性的是马里兰大学研制的Ranger试验系统,Padova大学的CISAS重心研制的水下机器人系统。
水浮法可以实现三维空间的微重力试验,且试验时间不受限制。其缺点是:水的阻力和紊流会改变机器人的动力学特性,影响了机器人的模拟精度;另外,空间机器人原型样机很难直接在水浮系统上进行测试,必须进行专门防水处理以免受到水下环境的影响,而且其维护成本非常高,同时要求试验期间的密封性非常好。
4、悬吊法
悬吊法的主要原理是通过绳索机构及滑轮组并利用配重来抵消飞行器自身的重力,即采用吊丝系统补偿飞行器竖直向下的重力,装置由吊丝、滑轮、导轨、桁架等组合而成,通过随动控制方法来使吊丝保持竖直,并控制向上的拉力始终等于悬挂体的重力。该系统包括一个克服重力的补偿系统和一个可控跟踪机器人运动的水平移动系统。
重力补偿悬挂系统主要有两种形式,即主动重力补偿和被动重力补偿。主动式补偿精度一般为0.01g,被动式补偿能达到0.08g,当吊丝长20m时,也能达到0.01g的量级。主动控制重力补偿系统区别于被动补偿系统之处在于:主动控制重力补偿系统抵消重力的拉力来自可控的电机,通过控制电机使拉力保持恒定,吊丝在控制系统作用下上下伸缩,当悬挂体受外力作用时,其自身重力不影响它的运动,这种在控制吊丝随悬挂体伸缩同时保证提供恒张力的系统叫主动控制重力补偿系统。
悬吊法优于其结构相对简单且易于实现,目前许多国家在微重力模拟试验方面均使用此方法,例如美国Carnegie Mellon大学研制的SM2空间机器人地面实验系统、欧空局轻质飞行器的微重力模拟试验系统等。
图10 伸展杆一维直线运动展开试验
 图11 欧空局吊丝实验系统
图11 欧空局吊丝实验系统
悬吊法可进行三维空间模拟试验,结构相对简单,易于实现,实验时间不受限制,因此目前得到了广泛使用。其缺点是:支撑绳索的桁架机构复杂,占地空间大,绳索随动机构一般采用机械轴承支撑,运动摩擦大,严重影响试验精度。另外,柔性索在随动过程中,其之后运动和柔性抖动等耦合影响因素均对微重力模拟带来不利影响。
5、气悬浮法
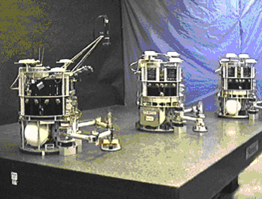
气悬浮法是通过平面止推气浮轴承,将由气泵配气箱分压后的气体,经平面止推气浮轴承喷出,利用气体压力,由气膜浮起试验目标飞行器,并通过改变节流孔的润滑气体压力,达到抵消自身重力和载荷的作用,最终使平面止推轴处于悬浮状态,这种悬浮状态使得摩擦力和粘附力几乎为零,此时仅存微弱的气浮阻力作用,这使得负载在轴向转动完全自由,使飞行器可以在整个光滑平台上自由移动,气浮阻力能够达到0.2N以内,是一种精度很高的微重力环境模拟方法,也是目前应用最广的方法之一。
美国Standford大学、日本东京理工大学等都建立了平面气浮台的地面实验系统。
图12 NASA编队飞行器仿真试验系统
 图13 Standford大学机器人气浮实验
图13 Standford大学机器人气浮实验
- 联系我们
- 新沂凯瑞克制冷科技有限公司
业务洽谈:177-178-58189
售后服务:177-599-58189
联系人: 王经理
地址: 新沂经济开发区
邮箱: admin@cryocold.cn
Copyright © 2019-2028中国·新沂凯瑞克制冷科技有限公司 All rights reserved.超低温技术支持:制冷吧提供超低温技术转让!
-150℃超低温冷阱,超低温冷疗舱,超低温气体冷冻机,小型液氮机,国产Polycold水汽捕集泵,超低温自复叠制冷高真空冷黑热沉环境模拟试验舱深冷低温处理箱设备替代液氮技术|高低温一体机|超低温设备定做|自复叠制冷技术
本站关键词:超低温冷疗舱|金属处理箱|小型液氮机|气体冷冻机|真空热沉试验舱|环境模拟试验箱|超低温试验箱|超低温深冷处理箱|自复叠制冷替代液氮技术|polycold|水汽捕集泵|超低温捕集泵|超低温反应釜|超低温设备定做
友情链接: 百度一下
-150℃超低温冷阱,超低温冷疗舱,超低温气体冷冻机,小型液氮机,国产Polycold水汽捕集泵,超低温自复叠制冷高真空冷黑热沉环境模拟试验舱深冷低温处理箱设备替代液氮技术|高低温一体机|超低温设备定做|自复叠制冷技术
本站关键词:超低温冷疗舱|金属处理箱|小型液氮机|气体冷冻机|真空热沉试验舱|环境模拟试验箱|超低温试验箱|超低温深冷处理箱|自复叠制冷替代液氮技术|polycold|水汽捕集泵|超低温捕集泵|超低温反应釜|超低温设备定做
友情链接: 百度一下


